The complexity of the naive HAC algorithm in
Figure 17.2 is ![]() because we exhaustively scan
the
because we exhaustively scan
the ![]() matrix
matrix ![]() for the largest similarity in each of
for the largest similarity in each of ![]() iterations.
iterations.
For the four HAC methods discussed in this chapter a more
efficient algorithm is the priority-queue algorithm shown in
Figure 17.8 . Its time complexity is
![]() . The rows
. The rows ![]() of the
of the ![]() similarity matrix
similarity matrix ![]() are sorted in decreasing order of
similarity in the priority queues
are sorted in decreasing order of
similarity in the priority queues ![]() .
.
![]() then returns the cluster in
then returns the cluster in ![]() that currently has the
highest similarity with
that currently has the
highest similarity with ![]() , where we use
, where we use ![]() to denote the
to denote the ![]() cluster as in Chapter 16 . After creating the
merged cluster of
cluster as in Chapter 16 . After creating the
merged cluster of ![]() and
and ![]() ,
,
![]() is used as its representative. The function
SIM computes the similarity function for potential
merge pairs: largest similarity for single-link, smallest
similarity for complete-link, average similarity for GAAC
(Section 17.3 ), and centroid similarity for
centroid clustering (Section 17.4 ). We give an
example of how a row of
is used as its representative. The function
SIM computes the similarity function for potential
merge pairs: largest similarity for single-link, smallest
similarity for complete-link, average similarity for GAAC
(Section 17.3 ), and centroid similarity for
centroid clustering (Section 17.4 ). We give an
example of how a row of ![]() is processed
(Figure 17.8 , bottom panel).
The
loop in lines 1-7
is
is processed
(Figure 17.8 , bottom panel).
The
loop in lines 1-7
is ![]() and the loop
in lines 9-21 is
and the loop
in lines 9-21 is
![]() for an implementation of priority
queues that supports deletion and insertion in
for an implementation of priority
queues that supports deletion and insertion in
![]() . The overall complexity of the algorithm is therefore
. The overall complexity of the algorithm is therefore
![]() . In the definition of the
function SIM,
. In the definition of the
function SIM, ![]() and
and
![]() are the vector
sums of
are the vector
sums of
![]() and
and
![]() , respectively, and
, respectively, and ![]() and
and ![]() are the number of documents in
are the number of documents in
![]() and
and
![]() , respectively.
, respectively.
The argument of EFFICIENTHAC in Figure 17.8 is a set of vectors (as opposed to a set of generic documents) because GAAC and centroid clustering ( and 17.4 ) require vectors as input. The complete-link version of EFFICIENTHAC can also be applied to documents that are not represented as vectors.
For single-link, we can introduce a
next-best-merge array (NBM) as a further optimization
as shown in Figure 17.9 .
NBM
keeps track of what the best merge
is for each cluster.
Each of the two top level for-loops in Figure 17.9 are
![]() ,
thus the overall complexity of single-link clustering is
,
thus the overall complexity of single-link clustering is ![]() .
.
Can we also
speed up the other three HAC algorithms
with an NBM array?
We cannot because only single-link clustering is
best-merge persistent . Suppose that
the best merge cluster for ![]() is
is ![]() in
single-link clustering. Then after merging
in
single-link clustering. Then after merging
![]() with a third cluster
with a third cluster
![]() , the merge of
, the merge of ![]() and
and ![]() will
be
will
be ![]() 's best merge cluster
(Exercise 17.10 ). In other words,
the best-merge candidate for the merged cluster is
one of the two best-merge candidates of its components in
single-link clustering. This
means that
's best merge cluster
(Exercise 17.10 ). In other words,
the best-merge candidate for the merged cluster is
one of the two best-merge candidates of its components in
single-link clustering. This
means that
![]() can be updated in
can be updated in ![]() in each iteration - by taking a
simple max of two values
on line 14 in
Figure 17.9 for each of the remaining
in each iteration - by taking a
simple max of two values
on line 14 in
Figure 17.9 for each of the remaining ![]() clusters.
clusters.
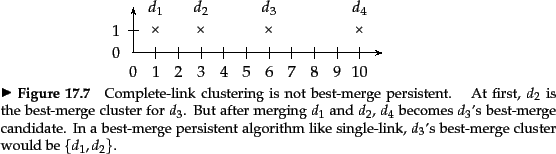
Figure 17.10 demonstrates that
best-merge persistence
does not hold for complete-link clustering, which means
that we cannot use an NBM array to speed up clustering.
After merging ![]() 's best merge candidate
's best merge candidate ![]() with
cluster
with
cluster ![]() , an unrelated cluster
, an unrelated cluster ![]() becomes the best merge candidate for
becomes the best merge candidate for ![]() . This is because the
complete-link
merge criterion is non-local and can be affected by points at a
great distance from the area where two merge candidates meet.
. This is because the
complete-link
merge criterion is non-local and can be affected by points at a
great distance from the area where two merge candidates meet.
In practice, the efficiency
penalty of the
![]() algorithm is small compared with
the
algorithm is small compared with
the ![]() single-link algorithm since computing the
similarity between two documents (e.g., as a
dot product)
is an order of magnitude slower than
comparing two scalars in sorting. All four HAC algorithms
in this chapter
are
single-link algorithm since computing the
similarity between two documents (e.g., as a
dot product)
is an order of magnitude slower than
comparing two scalars in sorting. All four HAC algorithms
in this chapter
are ![]() with respect to similarity computations.
So the difference in complexity is rarely a concern in practice when
choosing one of the algorithms.
with respect to similarity computations.
So the difference in complexity is rarely a concern in practice when
choosing one of the algorithms.
Exercises.
![\begin{figure}
% latex2html id marker 26593
\begin{algorithm}{EfficientHAC}{\vec...
...a made up example
showing $P[5]$\ for
a $5 \times 5$\ matrix $C$.
}
\end{figure}](img1572.png)
![\begin{figure}
% latex2html id marker 26700
\begin{algorithm}{SingleLinkClusteri...
...y $I[i]$\ and will therefore be ignored when
updating $NBM[i_1]$.
}
\end{figure}](img1587.png)