| (190) |
The definition assumes that documents are represented as
length-normalized vectors in a real-valued space in the familiar way. We used
centroids for Rocchio classification in
Chapter 14 (page 14.2 ). They play a
similar role here. The ideal cluster in ![]() -means
is a sphere with the centroid as its center of gravity.
Ideally, the clusters should not overlap. Our desiderata
for classes in Rocchio classification were the same. The
difference is that we have no labeled training set in
clustering for which we know which documents should be in
the same cluster.
-means
is a sphere with the centroid as its center of gravity.
Ideally, the clusters should not overlap. Our desiderata
for classes in Rocchio classification were the same. The
difference is that we have no labeled training set in
clustering for which we know which documents should be in
the same cluster.
A measure of how well the centroids represent the members of their clusters is the residual sum of squares or RSS , the squared distance of each vector from its centroid summed over all vectors:
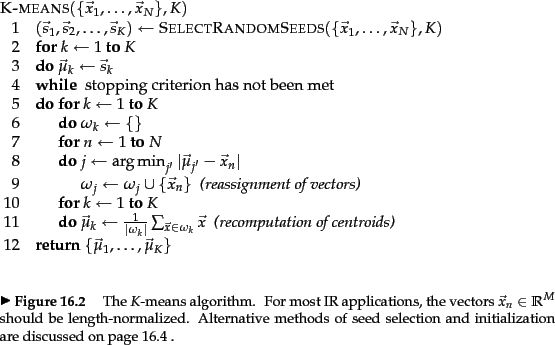
The first step of
We can apply one of the following termination conditions.
We now show that ![]() -means converges by proving that
-means converges by proving that
![]() monotonically decreases in each
iteration. We will use decrease in the meaning
decrease or does not change in this section.
First, RSS decreases in the reassignment step
since each vector is assigned to the closest centroid, so
the distance it contributes to
monotonically decreases in each
iteration. We will use decrease in the meaning
decrease or does not change in this section.
First, RSS decreases in the reassignment step
since each vector is assigned to the closest centroid, so
the distance it contributes to ![]() decreases.
Second, it decreases in the recomputation step
because the new centroid is the vector
decreases.
Second, it decreases in the recomputation step
because the new centroid is the vector ![]() for which
for which ![]() reaches its minimum.
reaches its minimum.
 |
(192) | ||
 |
 |
(193) |
 |
(194) |
Since there is only a finite set of possible clusterings, a monotonically decreasing algorithm will eventually arrive at a (local) minimum. Take care, however, to break ties consistently, e.g., by assigning a document to the cluster with the lowest index if there are several equidistant centroids. Otherwise, the algorithm can cycle forever in a loop of clusterings that have the same cost.
While this proves the convergence of
![]() -means, there is unfortunately no guarantee that a
global minimum in the objective function will be reached. This is a particular
problem if a document set contains many
outliers , documents that are far from any other documents and
therefore do not fit well into any cluster. Frequently, if an
outlier is chosen as an initial seed, then
no other vector is assigned to it during
subsequent iterations. Thus, we end up with a singleton
cluster (a cluster with only one document) even though
there is probably a clustering with lower RSS.
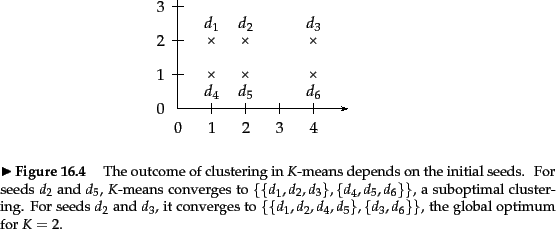
Figure 16.7 shows an example of a suboptimal
clustering resulting from a bad choice of initial seeds.
-means, there is unfortunately no guarantee that a
global minimum in the objective function will be reached. This is a particular
problem if a document set contains many
outliers , documents that are far from any other documents and
therefore do not fit well into any cluster. Frequently, if an
outlier is chosen as an initial seed, then
no other vector is assigned to it during
subsequent iterations. Thus, we end up with a singleton
cluster (a cluster with only one document) even though
there is probably a clustering with lower RSS.
Figure 16.7 shows an example of a suboptimal
clustering resulting from a bad choice of initial seeds.
Another type of suboptimal clustering that frequently occurs is one with empty clusters (Exercise 16.7 ).
Effective heuristics for seed
selection include (i) excluding outliers from the seed set;
(ii) trying out multiple starting points and choosing the
clustering with lowest cost; and (iii) obtaining seeds from
another method such as hierarchical clustering. Since
deterministic hierarchical clustering methods are more
predictable than ![]() -means, a hierarchical
clustering of a small random sample of size
-means, a hierarchical
clustering of a small random sample of size ![]() (e.g., for
(e.g., for
![]() or
or ![]() ) often provides good seeds (see the
description of the Buckshot algorithm, Chapter 17 ,
page 17.8 ).
) often provides good seeds (see the
description of the Buckshot algorithm, Chapter 17 ,
page 17.8 ).
Other initialization methods compute seeds that are not
selected from the vectors to be clustered. A robust method
that works well for a large variety of document
distributions is to select ![]() (e.g.,
(e.g., ![]() ) random vectors
for each cluster and use their centroid as the seed for this
cluster. See Section 16.6 for
more sophisticated initializations.
) random vectors
for each cluster and use their centroid as the seed for this
cluster. See Section 16.6 for
more sophisticated initializations.
What is the time complexity of ![]() -means? Most of
the time is spent on computing vector distances. One such
operation costs
-means? Most of
the time is spent on computing vector distances. One such
operation costs ![]() . The reassignment step computes
. The reassignment step computes
![]() distances, so its overall complexity is
distances, so its overall complexity is
![]() . In the recomputation step, each vector gets
added to a centroid once, so the complexity of this step is
. In the recomputation step, each vector gets
added to a centroid once, so the complexity of this step is
![]() . For a fixed number of iterations
. For a fixed number of iterations ![]() , the
overall complexity is therefore
, the
overall complexity is therefore
![]() . Thus,
. Thus, ![]() -means
is linear in all relevant factors: iterations, number of
clusters, number of vectors and dimensionality of the
space. This means that
-means
is linear in all relevant factors: iterations, number of
clusters, number of vectors and dimensionality of the
space. This means that ![]() -means is more efficient than the
hierarchical algorithms in Chapter 17 . We had to
fix the number of iterations
-means is more efficient than the
hierarchical algorithms in Chapter 17 . We had to
fix the number of iterations ![]() , which can be tricky
in practice. But in most cases,
, which can be tricky
in practice. But in most cases, ![]() -means
quickly reaches either complete convergence or a clustering that is
close to convergence. In the latter case,
a few documents would switch membership if further
iterations were computed, but this has a small effect on the
overall quality of the clustering.
-means
quickly reaches either complete convergence or a clustering that is
close to convergence. In the latter case,
a few documents would switch membership if further
iterations were computed, but this has a small effect on the
overall quality of the clustering.
There is one subtlety in the preceding argument. Even a linear
algorithm can be quite slow if one of the arguments of
![]() is
large, and
is
large, and ![]() usually is large.
High
dimensionality is not a problem for computing the distance
between
two documents. Their vectors are sparse, so
that only a small fraction of the theoretically
possible
usually is large.
High
dimensionality is not a problem for computing the distance
between
two documents. Their vectors are sparse, so
that only a small fraction of the theoretically
possible ![]() componentwise differences need to be
computed.
Centroids, however, are dense since they pool all
terms that occur in any of the documents of their
clusters. As a result, distance computations are time consuming in a
naive implementation of
componentwise differences need to be
computed.
Centroids, however, are dense since they pool all
terms that occur in any of the documents of their
clusters. As a result, distance computations are time consuming in a
naive implementation of ![]() -means.
However,
there are simple and
effective heuristics for making centroid-document
similarities as fast to compute as document-document
similarities. Truncating
centroids to the most significant
-means.
However,
there are simple and
effective heuristics for making centroid-document
similarities as fast to compute as document-document
similarities. Truncating
centroids to the most significant ![]() terms (e.g.,
terms (e.g., ![]() )
hardly decreases cluster quality while achieving a
significant speedup of the reassignment step (see references
in Section 16.6 ).
)
hardly decreases cluster quality while achieving a
significant speedup of the reassignment step (see references
in Section 16.6 ).
The same efficiency problem is addressed by K-medoids , a variant
of ![]() -means that computes medoids instead of centroids as
cluster centers. We define the medoid of a cluster as
the
document vector that is
closest to the centroid. Since medoids are sparse document
vectors, distance computations are fast.
-means that computes medoids instead of centroids as
cluster centers. We define the medoid of a cluster as
the
document vector that is
closest to the centroid. Since medoids are sparse document
vectors, distance computations are fast.
![\includegraphics[width=8cm]{kmeansknee.eps}](img1465.png) Estimated minimal residual sum of squares as a function of the number
of clusters in
Estimated minimal residual sum of squares as a function of the number
of clusters in